多机器人系统在现代工业、仓储、搜救等领域扮演着越来越重要的角色。然而,如何让多个机器人协同完成复杂的、长时间的任务,特别是高效地进行任务分配和路径规划,一直是机器人学领域面临的巨大挑战。传统的任务规划方法往往效率低下、泛化性差,难以应对现实世界中的动态变化和突发情况。近期,一项来自智源人工智能研究院的开创性研究为这一难题带来了新的解决方案。该研究提出了一种通用的多机器人长时任务规划框架,并成功提升了任务完成的成功率和效率,相关成果已被机器人领域顶级会议 ICRA 2025 接收。
多机器人任务规划的挑战
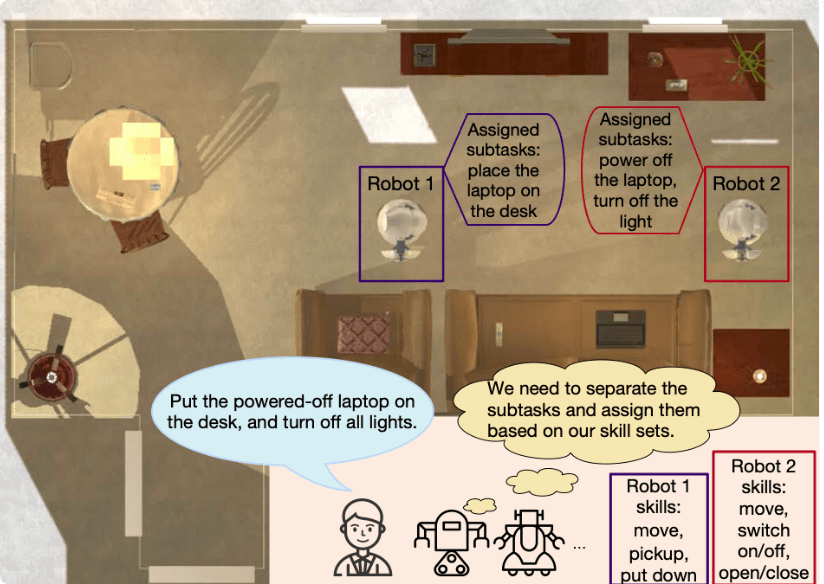
想象一下在一个大型仓库里,几十甚至上百个搬运机器人需要同时完成不同的取货、送货任务。或者在灾难现场,多架无人机需要协同进行侦察和搜救。这些场景都对多机器人系统的任务规划能力提出了 high requirements。
multi-robot task planning challenges mainly include:
- 任务分配(Task Allocation) 如何将不同的任务合理地分配给不同的机器人,使得 overall efficiency highest 或 completion time shortest。
- 路径规划(Path Planning) 每个机器人如何在 allocated tasks 的基础上规划出 avoid collision 的路径。
- 长时任务(Long-term Tasks) 如何处理需要长时间执行的任务,期间可能出现新的任务、机器人故障、环境变化等 unexpected situations。
- 通用性(Generality) 如何设计一个框架能够适用于 different types of robots 和 different mission scenarios。
传统的解决方案 often requires manual tuning or is designed for specific scenarios,难以 scale up to large-scale and complex long-term tasks。
智源通用多机器人长时任务规划框架的创新
智源研究院提出的通用多机器人长时任务规划框架, aim to tackle these challenges by leveraging advanced AI techniques。该框架的核心创新点在于其 通用的任务表示 和 高效的规划策略。
通用的任务表示
为了实现框架的通用性,研究人员设计了一种能够表示不同类型任务的统一格式。这种格式可以 capturing the essential information of each task,比如任务类型、位置、所需资源、优先级等,使得框架能够处理 divers task types。
高效的规划策略
框架采用了一种高效的规划策略, often combines high-level task assignment with low-level path planning。它能够 dynamically adjust 任务分配和路径规划 based on the real-time status of robots and environment changes。
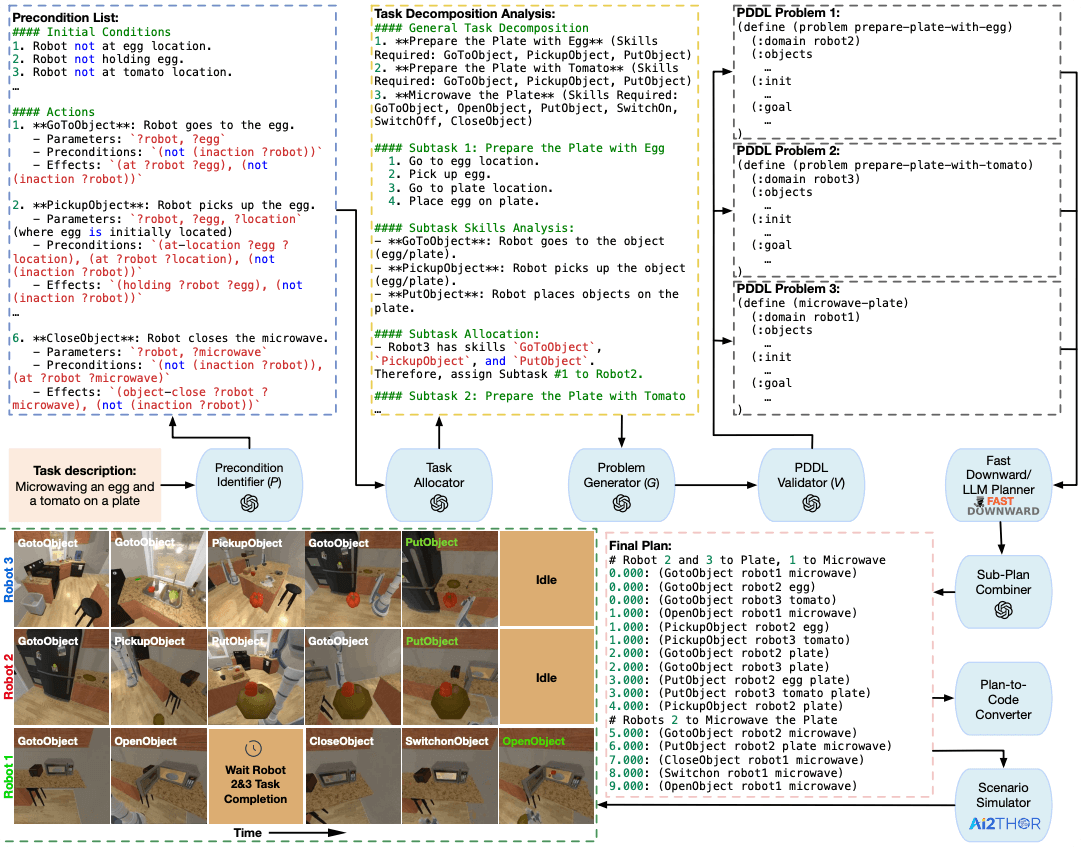
这种策略可能采用了 reinforced learning, heuristic search, or optimization techniques to find the optimal solution in a complex state space。特别是针对长时任务,框架可能 incorporates mechanisms for rescheduling and adapting to unexpected events。
实验结果惊人 成功率效率双飞跃
该研究在多个模拟环境和真实机器人平台上对提出的框架进行了 thorough evaluation。实验结果显示,与传统的任务规划方法相比,智源的通用多机器人长时任务规划框架取得了 remarkable improvements。
任务成功率提升 +105%
在复杂的长时任务场景下,由于能够更好地处理动态变化和任务分配难题,该框架的任务完成成功率比 baseline 方法提升了 alarming 105%。这意味着在同样的任务集合下,更多的任务能够被 successfully completed。
整体任务执行效率提升 +36%
除了成功率,该框架在任务执行效率方面也展现出了 significant superiority。实验数据显示,整体任务执行效率提升了 impressive 36%。这可能体现在 overall task completion time shorter 或 resource utilization higher。
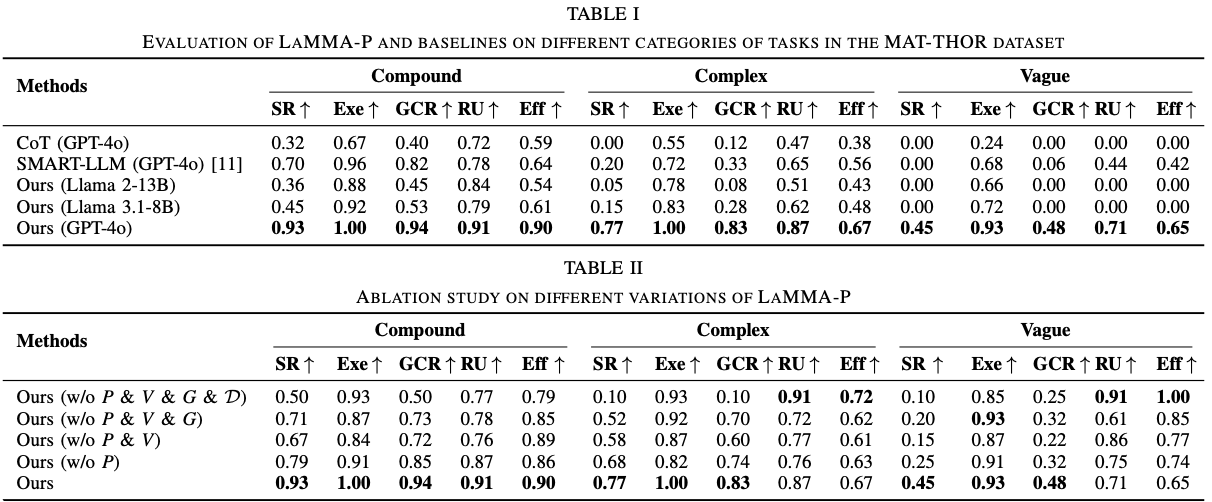
These results highlight the effectiveness and superiority of the proposed framework in handling complex multi-robot long-term task planning problems.
ICRA 2025 认可 迈向更智能的多机器人系统
该研究成果已被机器人学领域最重要的国际会议之一 ICRA 2025 接收。这标志着该研究在学术界获得了 high recognition,也 validates its technical contribution。
该框架的提出, 为构建 more robust, efficient, and general multi-robot systems 提供了 valuable insights and practical solutions。它有望在物流、制造、农业、应急响应等多个领域发挥 important role,推动多机器人技术的 further development and application。
智源研究院在多机器人协同规划领域的这项前沿研究, 为解决长期困扰业界的任务分配难题带来了新的曙光。该通用框架的成功, 不仅提升了多机器人系统的性能,更 towards the realization of truly intelligent and autonomous multi-robot collaboration迈出了 solid step。


2025 AI 技术峰会

AI 实战课程
热门工具
AI 助手
智能对话,提升效率
智能图像处理
一键美化,智能修图
AI 翻译
多语言实时翻译



评论 (0)
暂无评论,快来发表第一条评论吧!